メイカーズ塾では、次回はモータ制御を学習する予定。対象とするのは、DCモータとサーボモータ。DCモータは安価に入手できるので部材コストが安く上がる。サーボモータはそこそこ値が張るが、教材用に利用してと、ある方からの差し入れがあり、急遽、課題に取り入れることとした。
3種類のモータの特徴を簡単に紹介する。
DCモータは、プラモデルとかに使うごく一般的なモータ。電源をつなげば回るだけ。電圧や電流を制御すれば速度を制御する事ができるが、細かい制御には向いていない。。
2番目は、ステッピングモータ。パルスモータとも呼ばれる。相信号を制御することで正逆どちら回転でも動かせるし、相を早くすれば速度も制御出来る。ただ、どうしてもかくかくした動きになってしまう。また、相を早くしすぎると、ハードの機構が付いてこられず脱調を起こしてしまう。
30年ほど前に三菱電機がムーブマスターという6軸の腕型ロボットを発売したら、たいそう評判になり、結構売れた。NECが2匹目のドジョウを狙って試作することに。当時アルバイトしていたNECの子会社で、私が試作のハードウェア設計を担当したので、パルスモータ制御に関してはかなり詳しい。
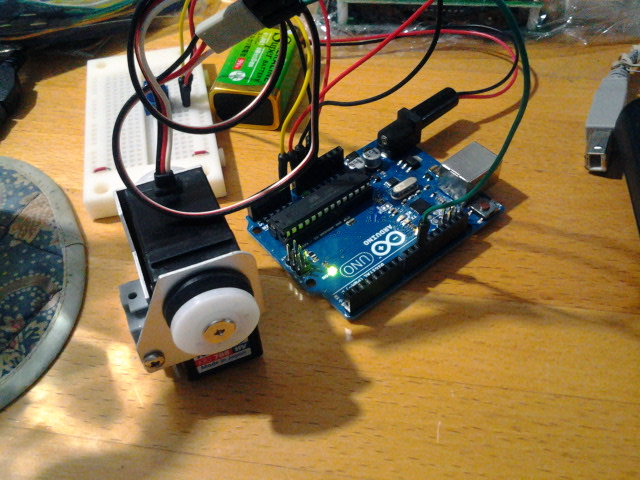
3番目は、サーボモータ。回ると言うよりも、狙った角度に固定することが特徴。ロボットの足や腕を動かす際に使われる。何を隠そう、私は未だかつてサーボモータをいじったことがない。今回、制御方法を勉強しながらの予習だ。
とりあえず、自分で試しておかないと、塾生の質問にも答えられないので、寸暇を惜しんで勉強勉強・・・・
(Visited 838 times, 1 visits today)